









MATEK F411-WTE - Mateksys FLIGHT CONTROLLER SPECIFICATIONS
Use: Vehicles & Remote Control Toys
Recommend Age: 12+y.14+y.3-6y.6-12y.0-3y
Quantity: 1 pcs
Origin: Mainland China
Material: Composite Material
Brand Name: MATEKSYS

MATEKSYS Flight Controller F411-WTE STM32F41ICEU6 IMU BMI27O Barometer SPLO6-001 OSD AT7456E 2 1 No Blackbox 2x UARTs. Zx Full Softserial Ix I2C 1 Ax ADC (Vbat; Current. RSSI. AirSpeed) 6-30V DC IN (26S LiPo) 1324 current sensor (90A continuous)



Matek F411-WTE Flight Controller Features: Fall-WS-Interface. BMI220 Accelerometer. Barometer SPLO6-001. BMP280/DPS310 Pressure Sensor. SoftSerial UARTs (2x full-speed and 1x half-speed). PWM outputs (4x). Analog-to-Digital Converters (4x).
FC Specifications
MCU: 100MHz STM32F411CEU6
IMU: BMI270 (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
Blackbox: No
2x Uarts
2x Full Softserial
6x PWM outputs (2x Motors. 4x Servos)
1x I2C
4x ADC (VBAT. Current. RSSI. AirSpeed)
3x LEDs for FC STATUS (Blue. Red) and 3.3V indicator(Red)
Built in inverter on UART2-RX for SBUS input
Switchable Dual Camera Inputs
Vbat power ON/OFF switchable for VTX and camera
PPM receiver: not supported
Power
6~30V DC IN (2~6S LiPo)
132A Current Sense (Scale 250)
PDB/Current sense resistor: 90A continuous. 132A burst.
BEC 5V 1.5A for FC & Peripherals
BEC Vx 5A for servos. 5V/ 6V option
Vbat for VTX and camera (ON/OFF switchable)
LDO 3.3V 200mA
Battery Voltage Sensor: 1k:10k
FC Firmware
INAV Target: MATEKF411TE ( INAV4.1 or newer)
Physical
Dimensions: 31 x 26 x 16.5 mm
Mounting: 22 x 22mm. Φ2mm
Weight: 10g
Including
1x FC F411-WTE
Dupont 2.54 pins (Board is shipped unsoldered)
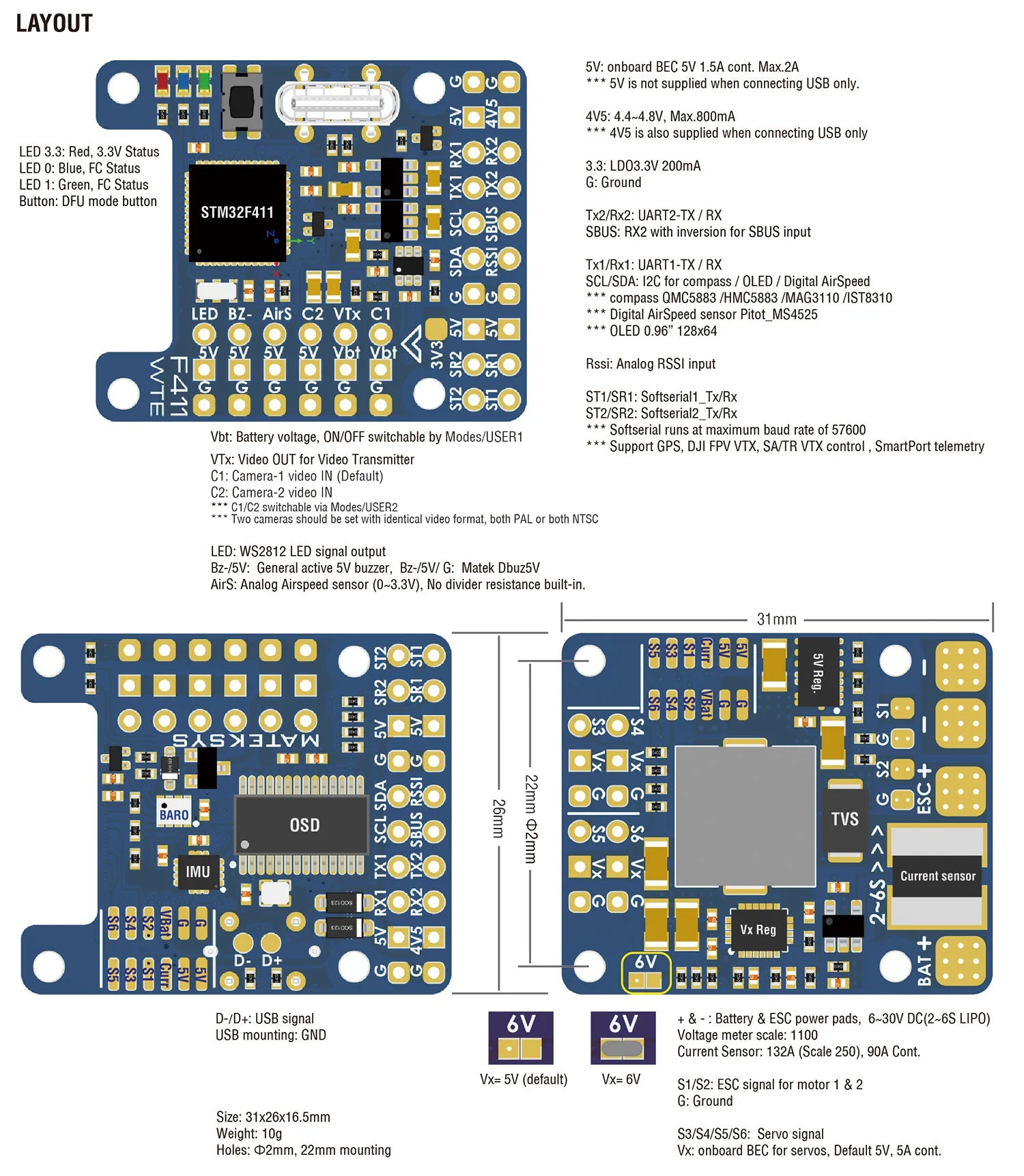
5V is not supplied when connecting USB only: 6 4V5: 4.44.8V. Max. 80OmA 4V 5 is also supplied when connected USB only . LED: WS2812 LED signal output Bz-/SV: General active SV buzzer .

TIPS
F411-WTE has INAV fw 4.1.0 preloaded for QC
Start with INAV5.0. MatekF411TE target will be listed in INAV configurator.
Download INAV firmware 4.x.x from our website(click “Firmwares” button at upper right corner)
You may download INAV 5.x or newer version directly from INAV configurator.